|
Stellarium
0.16.1
|
|
Stellarium
0.16.1
|
Interface for all Remote Control Plug-in services. More...
#include <RemoteControlServiceInterface.hpp>
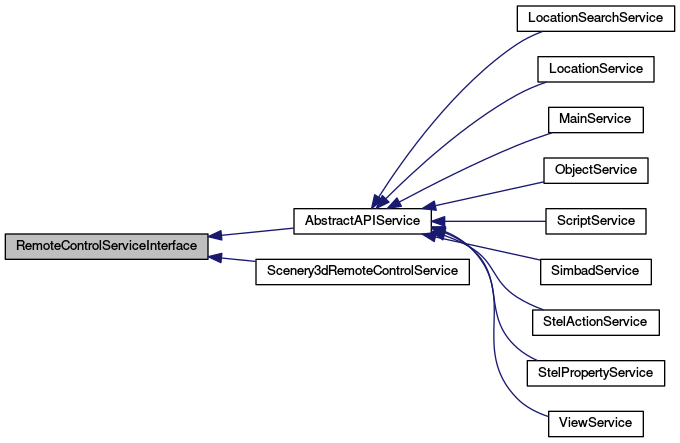
 Inheritance diagram for RemoteControlServiceInterface:
Inheritance diagram for RemoteControlServiceInterface:Public Member Functions | |
| virtual QLatin1String | getPath () const =0 |
| Returns the desired path mapping If there is a conflict, only the first object is mapped. More... | |
| virtual bool | isThreadSafe () const =0 |
| Return true if the service's get() and post() methods can safely be run in the HTTP handler thread, instead of having to queue it into the Stellarium main thread. More... | |
| virtual void | get (const QByteArray &operation, const APIParameters ¶meters, APIServiceResponse &response)=0 |
| Implement this to define reactions to HTTP GET requests. More... | |
| virtual void | post (const QByteArray &operation, const APIParameters ¶meters, const QByteArray &data, APIServiceResponse &response)=0 |
| Implement this to define reactions to HTTP POST requests. More... | |
| virtual void | update (double deltaTime)=0 |
| Called in the main thread each frame. More... | |
Interface for all Remote Control Plug-in services.
Each implementation is mapped to a separate HTTP request path. The get() or post() method is called to handle each request. Instances of this class which are provided through the StelModuleMgr's extension mechanism (by adding it into the list returned by StelPluginInterface::getExtensionList()) are automatically discovered and registered with the APIController.
Definition at line 179 of file RemoteControlServiceInterface.hpp.
|
pure virtual |
Implement this to define reactions to HTTP GET requests.
GET requests generally should only query data or program state, and not change it. If there is an error with the request, use APIServiceResponse::writeRequestError to notify the client.
| operation | The operation string of the request (i.e. the part of the request URL after the service name, without parameters) |
| parameters | The extracted service parameters (extracted from the URL) |
| response | The response object, write your response into this |
Implemented in MainService, AbstractAPIService, LocationSearchService, ObjectService, SimbadService, LocationService, StelActionService, ViewService, StelPropertyService, Scenery3dRemoteControlService, and ScriptService.
|
pure virtual |
Returns the desired path mapping If there is a conflict, only the first object is mapped.
Implemented in MainService, LocationSearchService, ObjectService, SimbadService, LocationService, StelActionService, ViewService, Scenery3dRemoteControlService, StelPropertyService, and ScriptService.
|
pure virtual |
Return true if the service's get() and post() methods can safely be run in the HTTP handler thread, instead of having to queue it into the Stellarium main thread.
This can result in better performance if done correctly. Unless you are sure, return false here.
Implemented in AbstractAPIService, LocationSearchService, SimbadService, and Scenery3dRemoteControlService.
|
pure virtual |
Implement this to define reactions to HTTP POST requests.
POST requests generally should change data or perform some action. If there is an error with the request, use APIServiceResponse::writeRequestError to notify the client.
| operation | The operation string of the request (i.e. the part of the request URL after the service name, without parameters) |
| parameters | The extracted service parameters (extracted from the URL, and form data, if applicable) |
| data | The unmodified data as sent from the client |
| response | The response object, write your response into this |
Implemented in MainService, AbstractAPIService, LocationService, StelActionService, StelPropertyService, ScriptService, and Scenery3dRemoteControlService.
|
pure virtual |
Called in the main thread each frame.
Can be used for ongoing actions, for example movement control.
Implemented in MainService, AbstractAPIService, and Scenery3dRemoteControlService.
 1.8.11
1.8.11